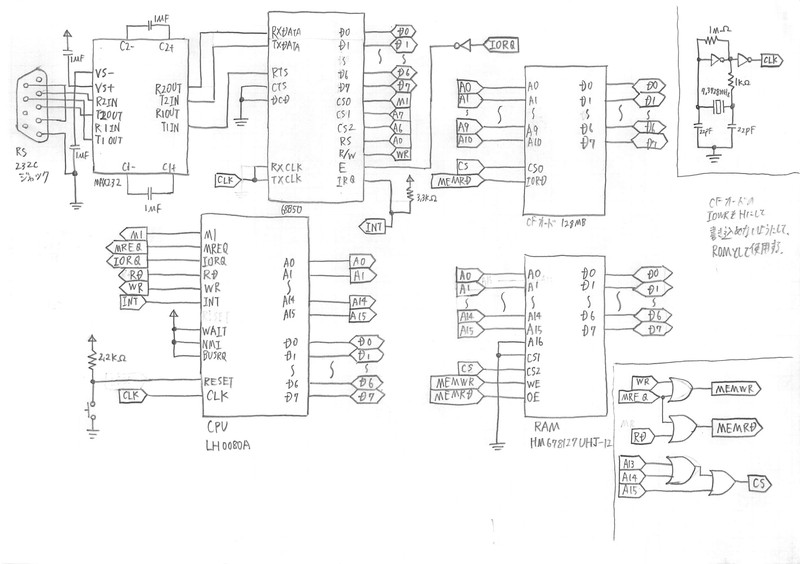
Z80 CPU「LH0080A」を頂いたので、自作のZ80、8ビットマイコンでHOPEシステムを制御することにしました。
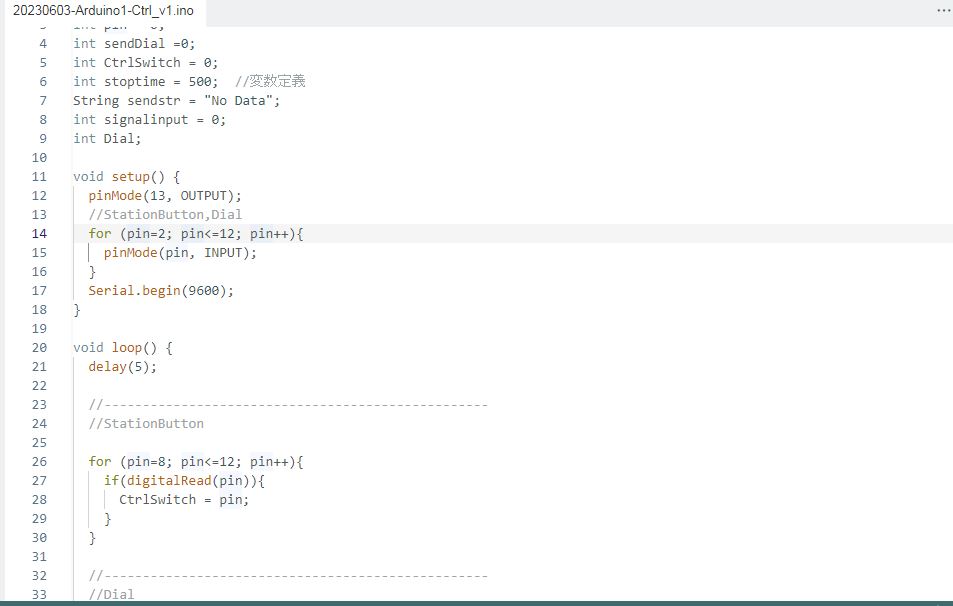
Maker Faire Kyoto 2023で展示したシステムのプログラム
先日、Maker Faire Kyoto 2023に出展する際、8bitマイコンがうまく動作せず、急遽、4台のArduinoを用いて動作を再現することになった。
カメラモジュール(ソフトウェア編)
HO車両に搭載するカメラモジュールのソフトウェアボードの書き込みの設定を知る方法がArduinoにはある。 ボードをデータとして配布している。 これをインストールすれば、ボードと押すだけで、ボードに合わせた書き込みの通信をしてくれる。
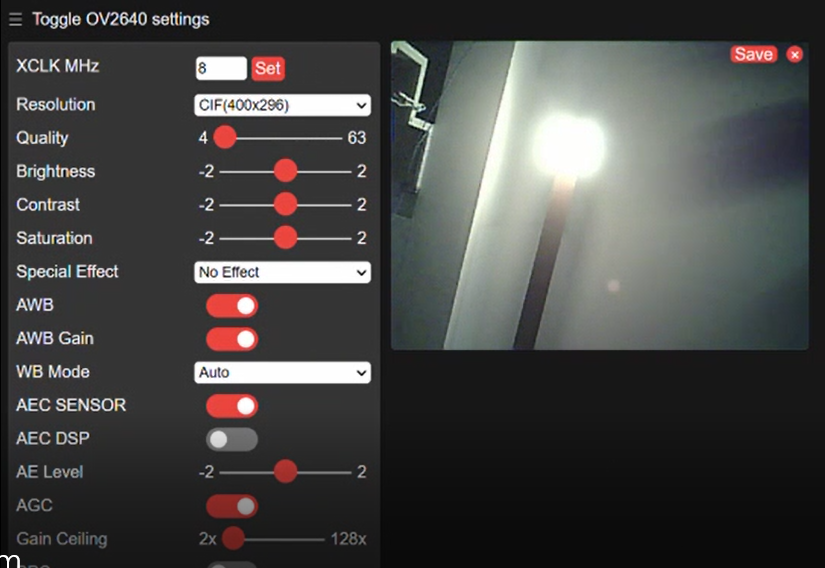
wifiを使ったwebカメラサーバーのテスト
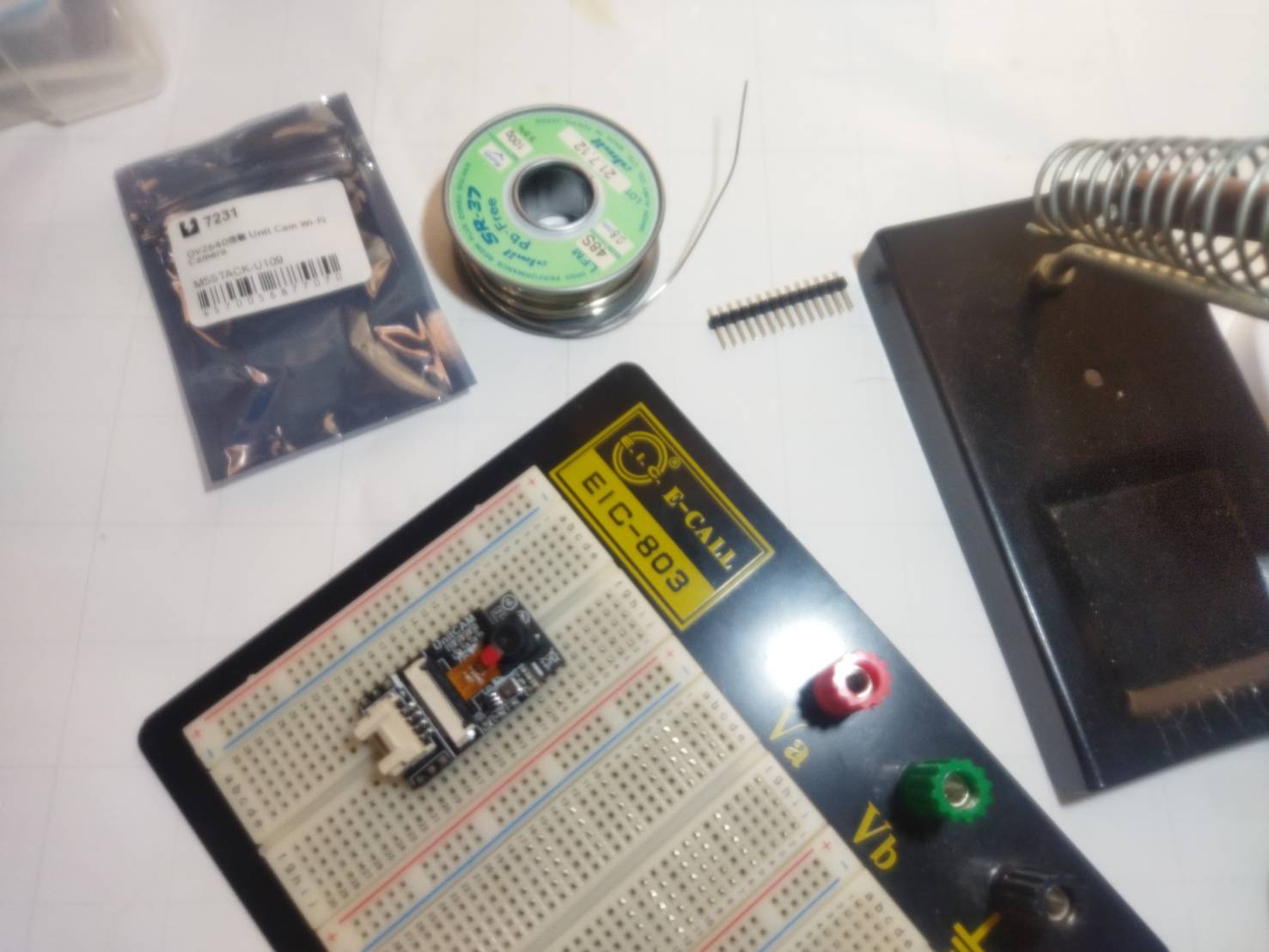
【この記事は製作途中です】 詳しい説明は、後ほど。 ハードウェア:Unit Cam Wi-Fi Camera (OV2640)メーカー:M5STACK社 ESP32-WROOM-32E、OV2640を搭載したカメラモジュール カメラテスト
カメラモジュール(ハードウェア編)
M5STACK社製の、ESP32-WROOM-32E、OV2640を搭載したカメラモジュールのハードウェアの調整を実施した。
HOPE-2023自動運転モード
これは、HOPE-2022のシステム紹介の動画です。HOPE-2023では、この自動運転をユーザーが運転席で運転士として操縦することで、思いのままに列車を運転できるようにします。 wi-fi、または、Bluetoothにより、列車に搭載されているカメラの映像を運転席の画面に飛ばすことで、臨場感と没入感の向上を目指します。
HOPE-2023の改良点
HOPE-2023の改良点は、(1)本物の電車に類似したハンドルで運転する運転台を装備と、(2)HO車両に カメラモジュールを載せて車載カメラで運転席からの眺めを楽しみながら、運転台で実際に運転することができるようになる点です。
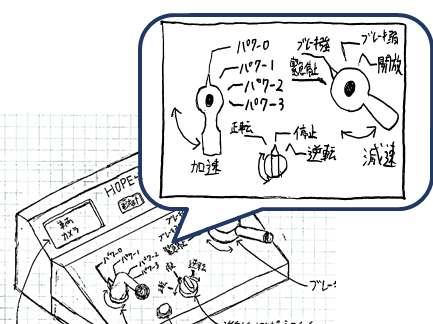
HOPE-2023画像(3)運転システムの具体的な要件
HOPE-2023で実装される運転システムには、いくつかの細かい機能があり、これらの機能により、リアルな列車制御を可能にします。 基本的に操作パネルはブレーキとアクセル、進行方向逆転スイッチの3種ですが、動作のうち、ブレーキを緊急停止に移動させた時と、進行中に突然方向を切り替える時は、少しだけ動作が変化するようにします。
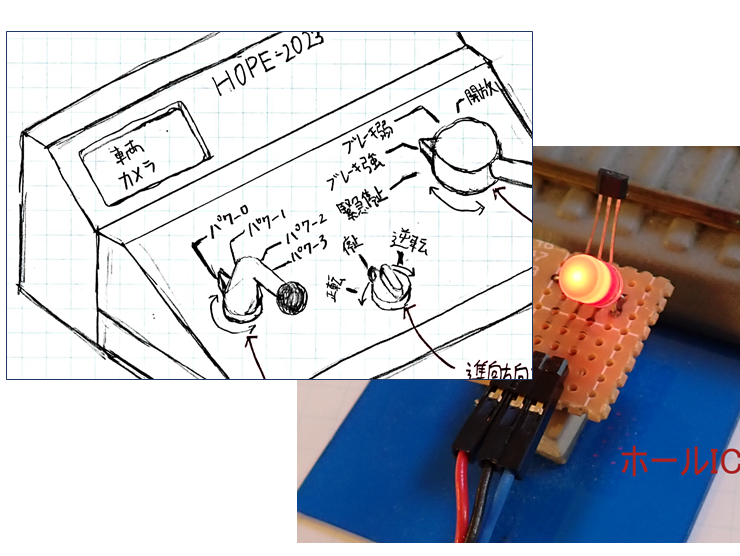
HOPE-2023画像(2)HOPE-2023システムの主な変更点
HOPE-2023システムには、HOPE-2022システムからいくつかの変更点があります。 まずは、運転席の追加です。この運転席にカメラを追加することによって、没入感の向上と、ワクワク感の増加を図ります。 また、ホール素子ICの接続方法を変更し、ダイオードを使って整理することに寄って、バグの少ないスムーズな動作と、必要とするポート数の削減を図ります。
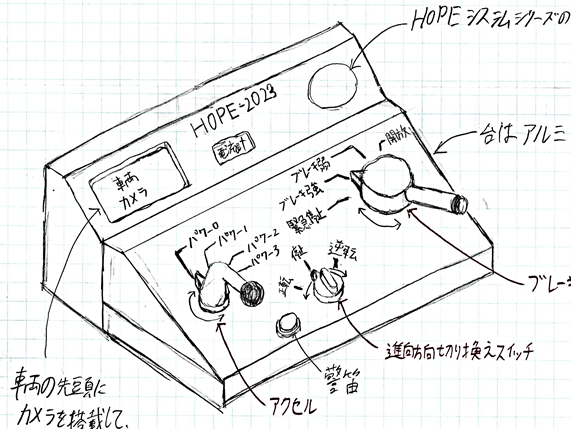
HOPE-2023画像(1)運転台の構想
HOPE-2023システムの目玉となる運転台の構想案です。京阪電車1000系などの主力車両の運転台をベースとし、速度計や気圧計に替えて、電流計とHO車両に搭載したカメラ映像を映し出すミニパネルを設置します。